外观
安装结构
结构设计
项目采用多外壳结构,由底盖,顶壳,头,左手臂,右手臂,腿,左脚,右脚构成。
外壳开源协议说明:本项目外壳由CC-BY及CC-BY-SA协议组成。
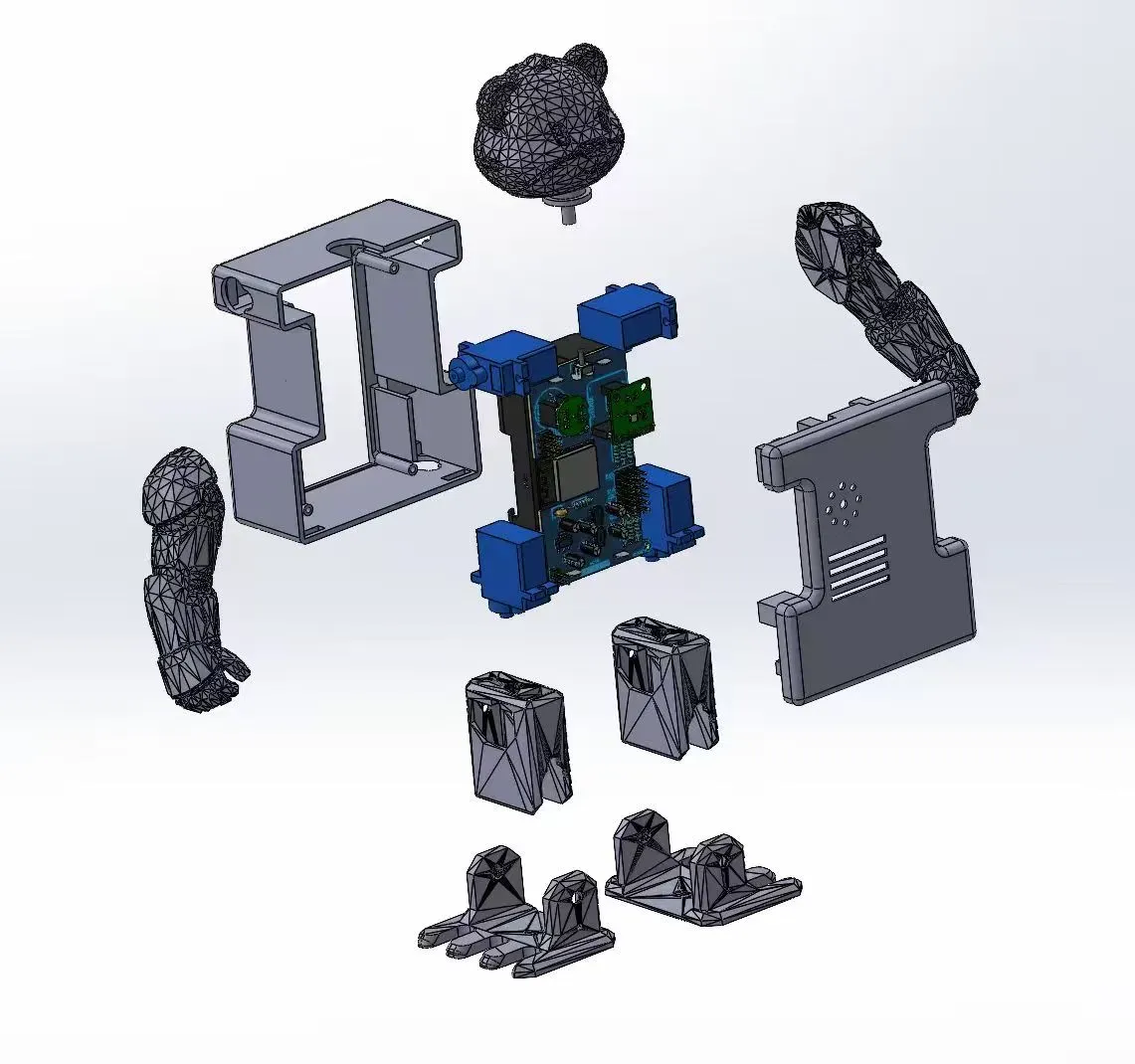
机器狗组装图
头部设计
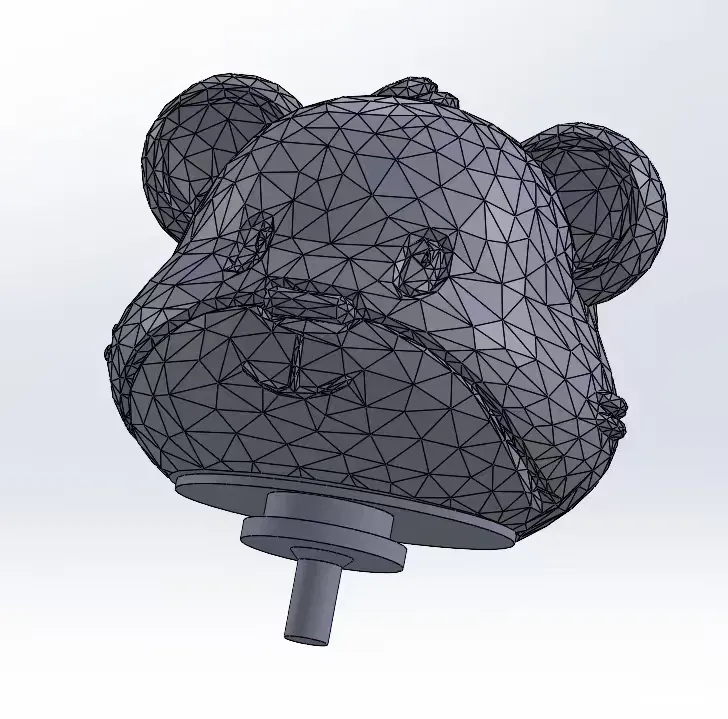
头部正面视图
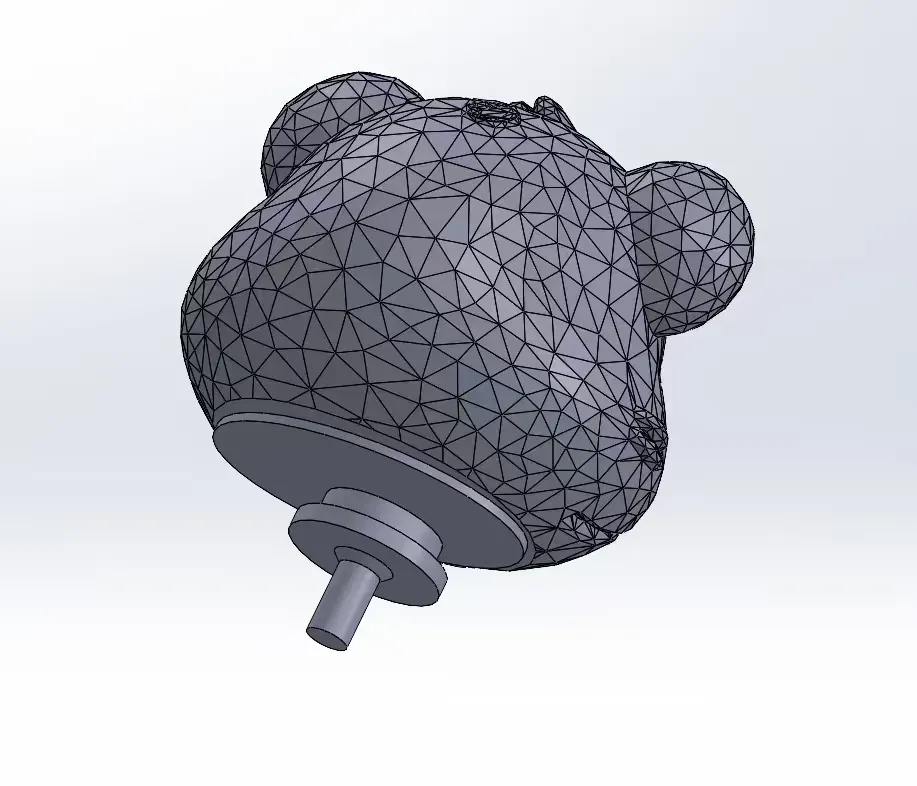
头部背面视图
- 头部模型由嘉立创模型商城官方的 嘉立创小熊 开源模型修改而来
- 中部凹环用于头部固定
- 底部长柄用于触发PCB上的按键
- 此壳体依照原模型作者的CC-BY协议开源
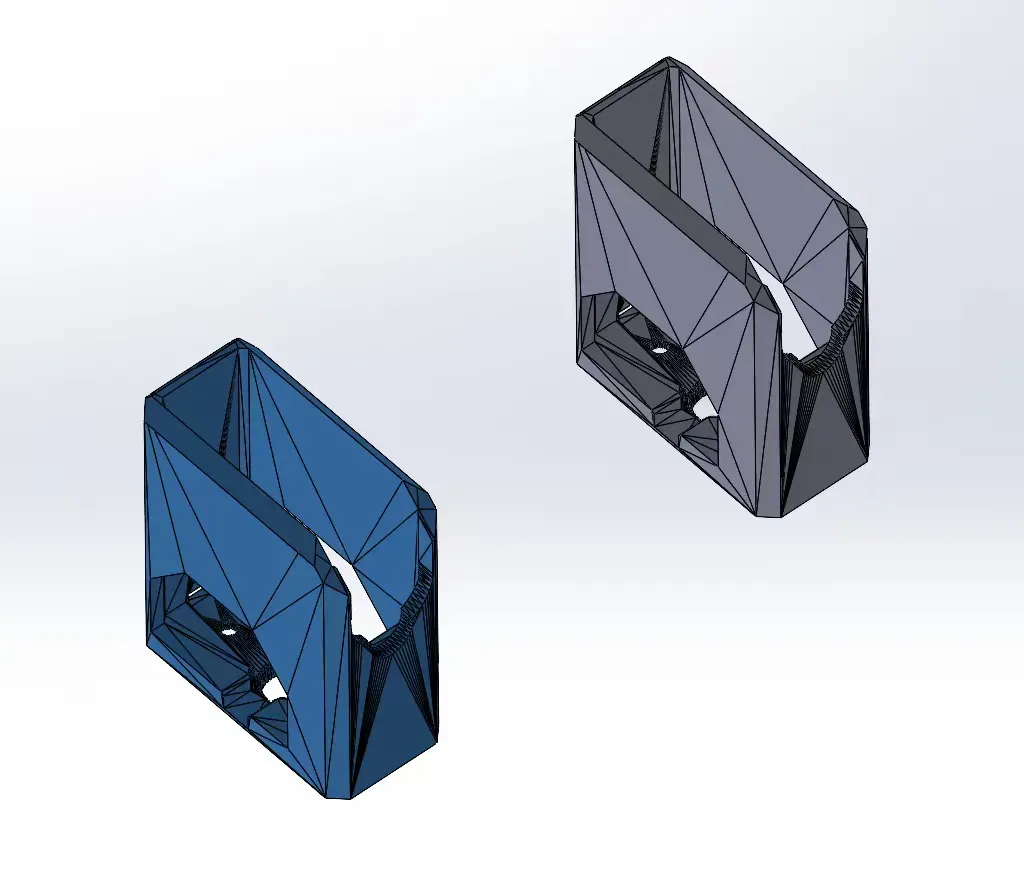
手臂设计
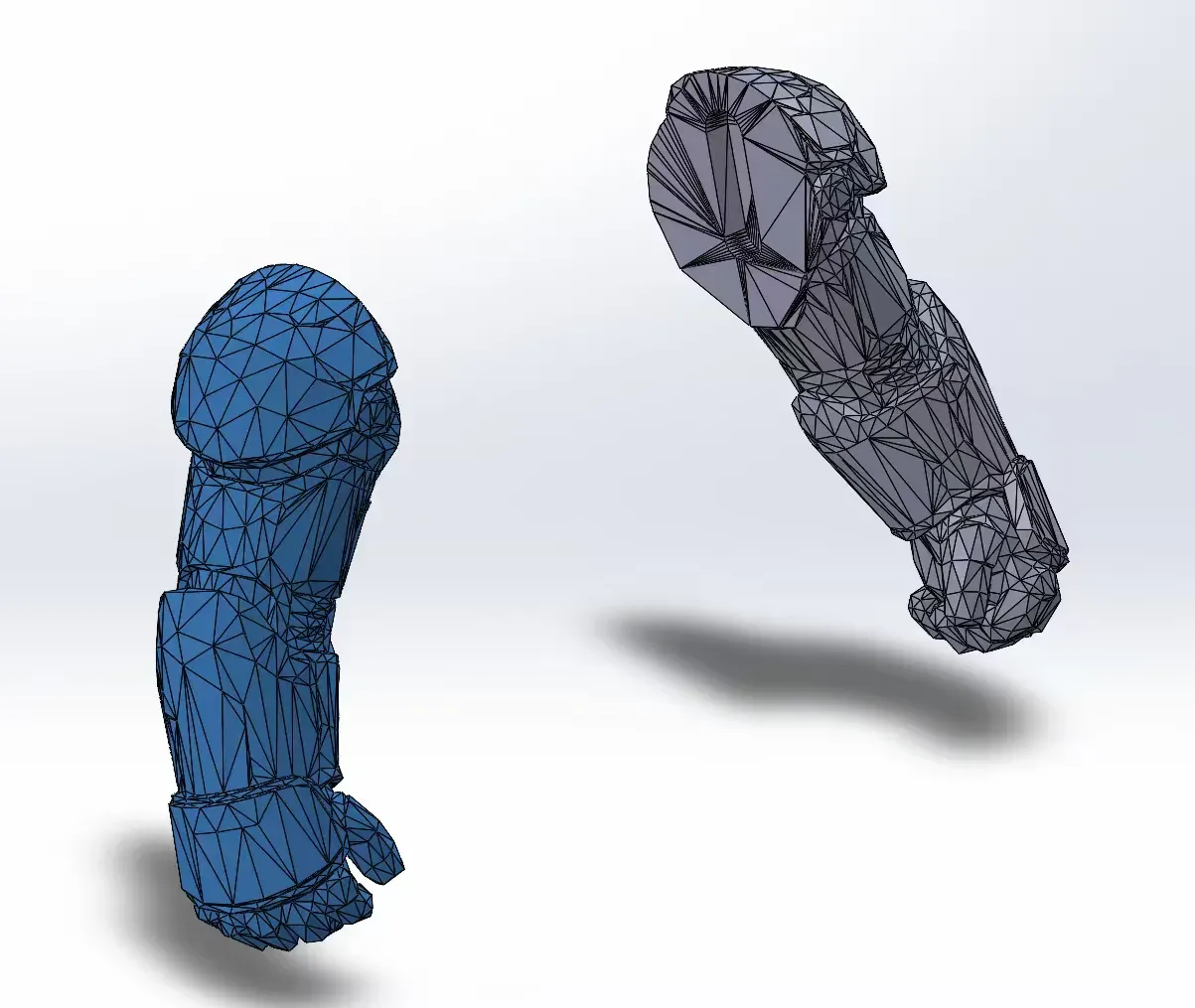
手臂正面视图
- 手臂模型由嘉立创模型商城官方的 中国队长-熊 开源模型修改而来
- 手臂内部设计有舵机支架孔位及螺丝孔,便于舵机连接
- 此壳体依照原模型作者的CC-BY协议开源
后盖设计
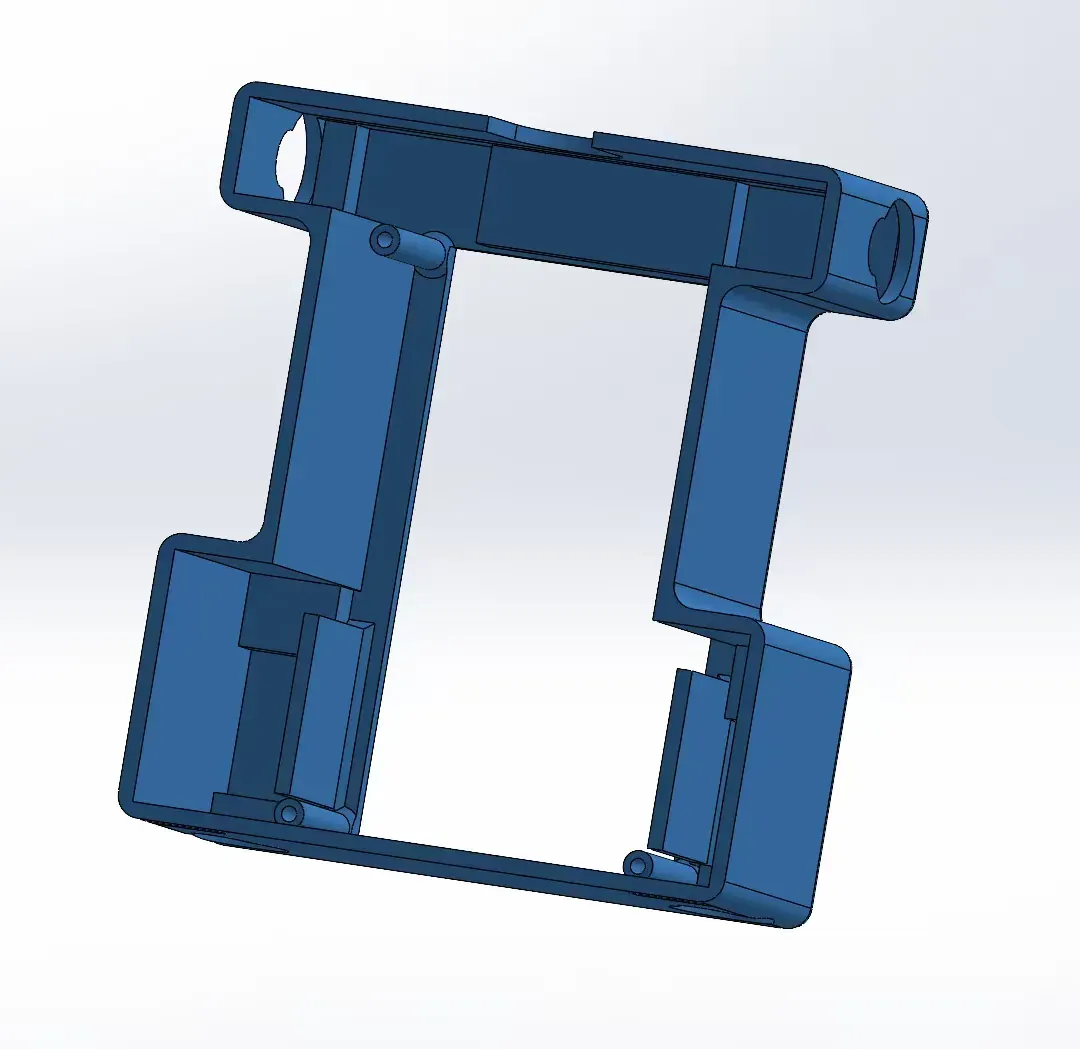
后盖正面视图

后盖背面视图
- 后盖内设计有PCB固定孔,并设计有舵机限位槽
- 背部为18650电池盒开孔,方便电池取出
- 底部设计有舵机线缆开孔及舵机开孔,方便连接腿部
前盖设计

前盖正面视图
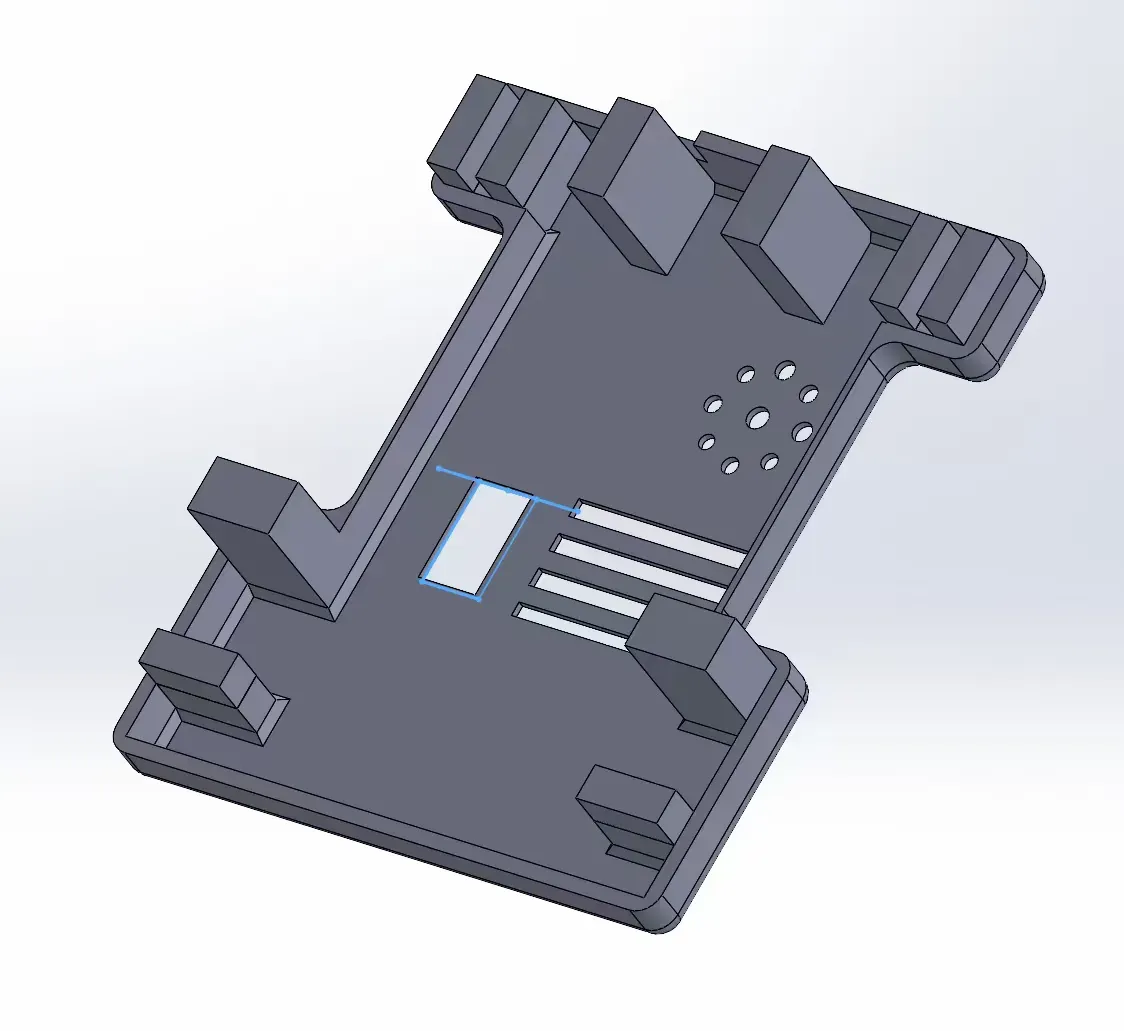
前盖背面视图
- 前盖设计有喇叭开孔,开关开孔及麦克风开孔
- 背部设计有舵机限位槽,避免舵机移位
- 前盖加高,便于藏线及舵机排针排母链接
腿部设计

腿部正面视图
腿部背面视图
- 腿部模型由Otto Robot官方的 Otto Biped 开源模型修改而来
- 腿部内部设计有舵机支架孔位及螺丝孔,便于舵机连接
- 此壳体依照原模型作者的CC-BY-SA协议开源
脚部设计
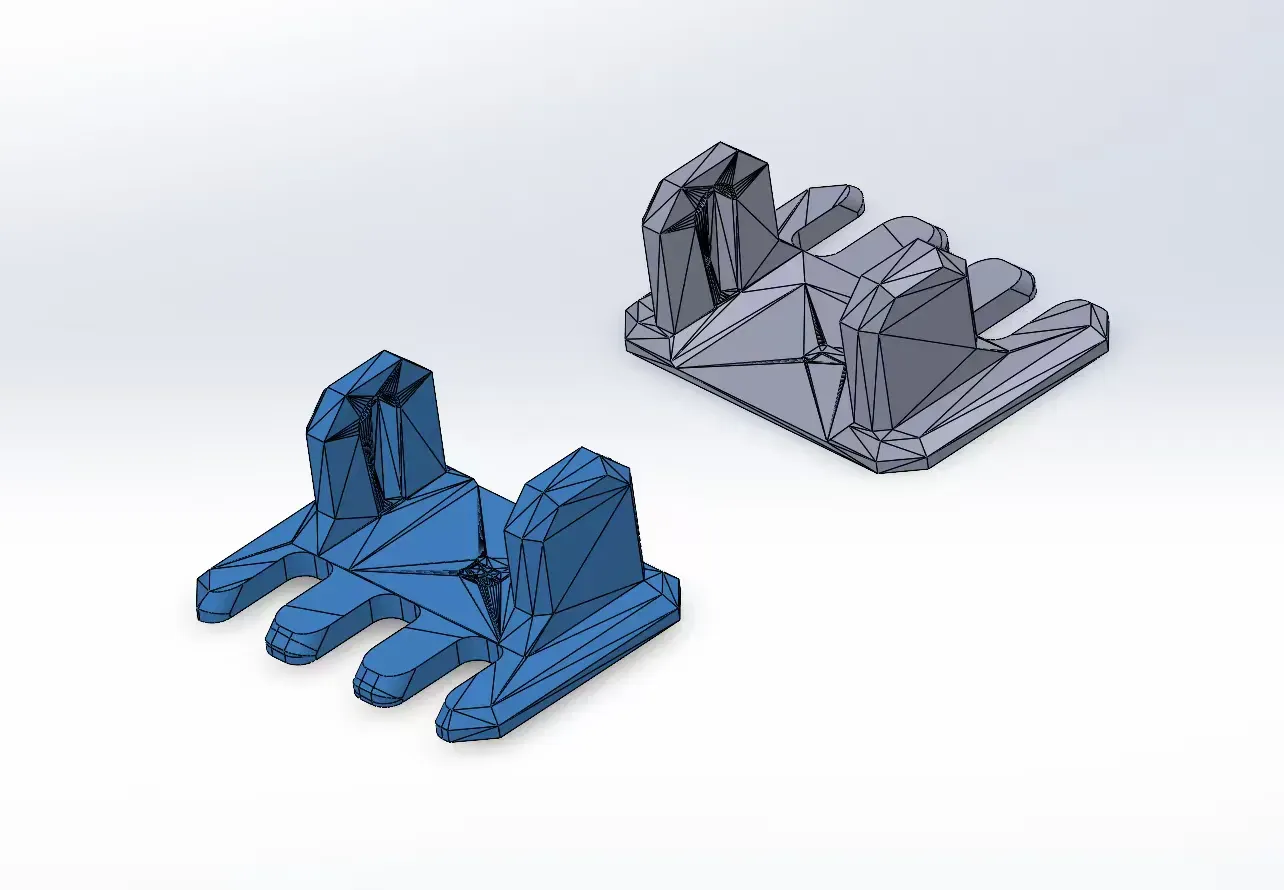
脚部正面视图
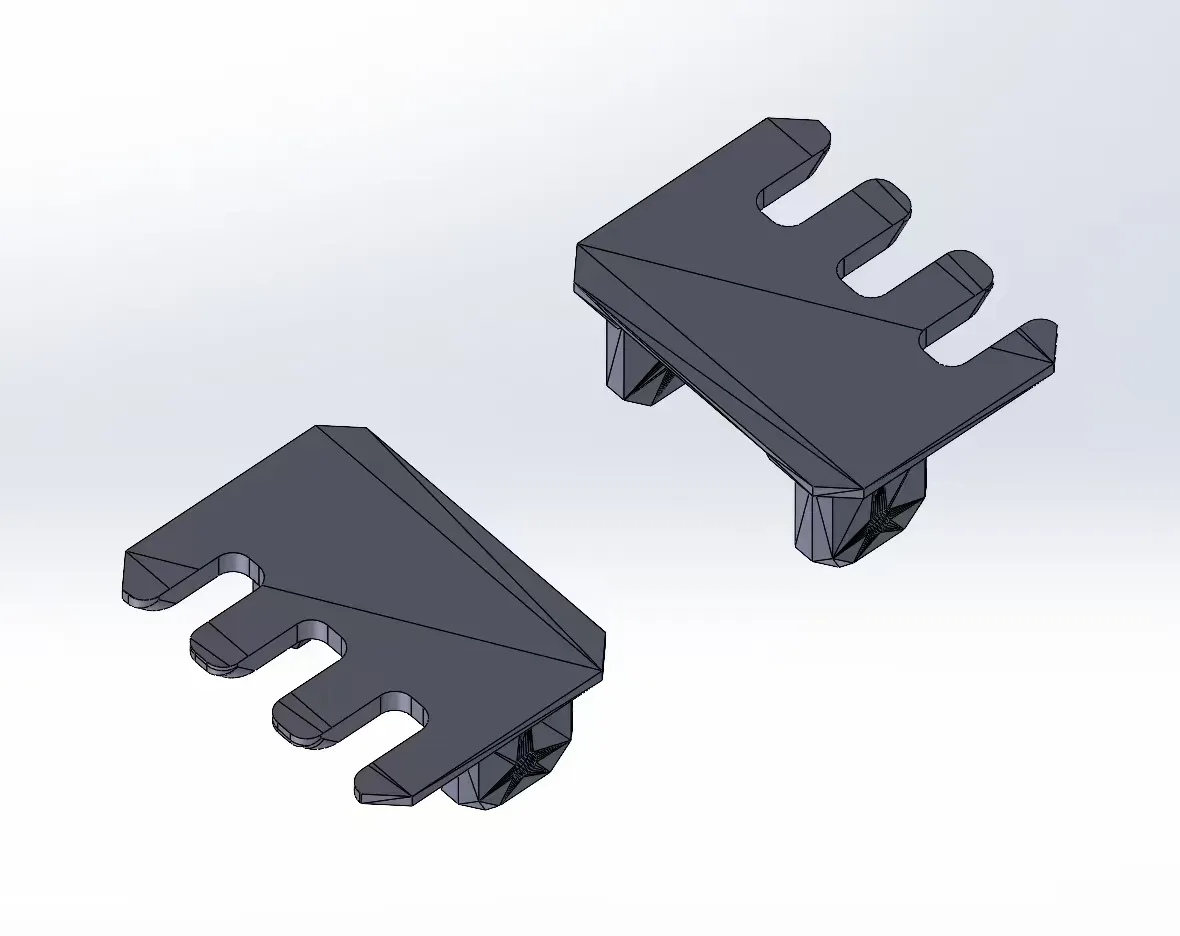
脚部背面视图
- 脚部模型由Otto Robot官方的 Otto Biped 开源模型修改而来
- 脚部内部设计有舵机支架孔位及螺丝孔,便于舵机连接
- 此壳体依照原模型作者的CC-BY-SA协议开源